Advanced Universal Control System May Revolutionize Lower Limb Exoskeleton Control and Optimize User Experience
Researchers harness deep reinforcement learning to enable natural and intuitive walking in exoskeletons
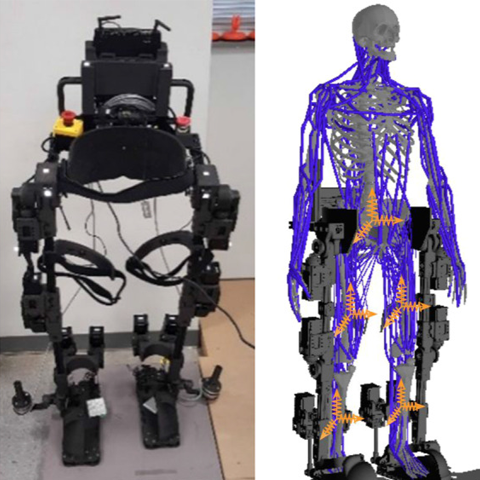
robotic exoskeleton (LE-RE). (Right) The integrated
musculoskeletal and exoskeleton model.
The yellow coordination frames show the bushing
frames coincidentally fixed on the LE-RE and the human.
East Hanover, NJ. June 15, 2023. A team of researchers has developed a new method for controlling lower limb exoskeletons using deep reinforcement learning. The method, described in a study published in the Journal of NeuroEngineering and Rehabilitation on March 19, 2023, enables more robust and natural walking control for users of lower limb exoskeletons. “Robust walking control of a lower limb rehabilitation exoskeleton coupled with a musculoskeletal model via deep reinforcement learning” is available open access (doi.org/10.1186/s12984-023-01147-2).
While advances in wearable robotics have helped restore mobility for people with lower limb impairments, current control methods for exoskeletons are limited in their ability to provide natural and intuitive movements for users. This can compromise balance and contribute to user fatigue and discomfort. Few studies have focused on the development of robust controllers that can optimize the user’s experience in terms of safety and independence.
Existing exoskeletons for lower limb rehabilitation employ a variety of technologies to help the user maintain balance, including special crutches and sensors, according to co-author Ghaith Androwis, PhD, senior research scientist in the Center for Mobility and Rehabilitation Engineering Research at Kessler Foundation and director of the Center’s Rehabilitation Robotics and Research Laboratory. Exoskeletons that operate without such helpers allow more independent walking, but at the cost of added weight and slow walking speed.
“Advanced control systems are essential to developing a lower limb exoskeleton that enables autonomous, independent walking under a range of conditions,” said Dr. Androwis. The novel method developed by the research team uses deep reinforcement learning to improve exoskeleton control. Reinforcement learning is a type of artificial intelligence that enables machines to learn from their own experiences through trial and error.
“Using a musculoskeletal model coupled with an exoskeleton, we simulated the movements of the lower limb and trained the exoskeleton control system to achieve natural walking patterns using reinforcement learning,” explained corresponding author Xianlian Zhou, PhD, associate professor and director of the BioDynamics Lab in the Department of Biomedical Engineering at New Jersey Institute of Technology (NJIT). “We are testing the system in real-world conditions with a lower limb exoskeleton being developed by our team and the results show the potential for improved walking stability and reduced user fatigue.”
The team determined that their proposed model generated a universal robust walking controller capable of handling various levels of human-exoskeleton interactions without the need for tuning parameters. The new system has the potential to benefit a wide range of users, including those with spinal cord injuries, multiple sclerosis, stroke, and other neurological conditions. The researchers plan to continue testing the system with users and further refine the control algorithms to improve walking performance.
"We are excited about the potential of this new system to improve the quality of life for people with lower limb impairments," said Dr. Androwis. "By enabling more natural and intuitive walking patterns, we hope to help users of exoskeletons to move with greater ease and confidence."
Citation: Susan Shuzhen Luo, Ghaith Androwis, Sergei Adamovich, Erick Nunez, Hao Su, and Xianlian Zhou. "Robust walking control of a lower limb rehabilitation exoskeleton coupled with a musculoskeletal model via deep reinforcement learning." Journal of NeuroEngineering and Rehabilitation 20, no. 1 (2023): 1-19. https://doi.org/10.1186/s12984-023-01147-2
Funding: National Institute on Disability Independent Living and Rehabilitation Research (NIDILRR) (90RE5021-01-0, SFGE22000372); National Science Foundation (1625644, 19444655, 2026622); National Institutes of Health (1RO1EB029765-01).
About New Jersey Institute of Technology
One of only 35 polytechnic universities in the United States, New Jersey Institute of Technology (NJIT) is an R1 (most elite) Carnegie Classification research university that offers more than 125 undergraduate and graduate degree programs and spurs economic growth while preparing students to become leaders in the technology-dependent economy of the 21st century. NJIT is a catalyst for applied research and innovation that improves lives and fosters economic growth. Ranked No. 14 in the nation on Money’s Best Colleges list, NJIT also stands among the top 100 colleges and universities nationally for the mid-career earnings of its graduates, according to PayScale.com. NJIT is ranked No. 35 nationally by The Princeton Review as a Best Value College and is rated among the top 50 public national universities and top 100 overall by U.S. News & World Report.
About Kessler Foundation
Kessler Foundation, a major nonprofit organization in the field of disability, is a global leader in rehabilitation research. Our scientists seek to improve cognition, mobility, and long-term outcomes, including employment, for adults and children with neurological and developmental disabilities of the brain and spinal cord including traumatic brain injury, spinal cord injury, stroke, multiple sclerosis, and autism. Kessler Foundation also leads the nation in funding innovative programs that expand opportunities for employment for people with disabilities.